
准备工作
在Apollo D-Kit中,各个传感器的坐标系定义如下图所示:

基于Lidar的自动驾驶需要对Lidar相对于GNSS设备的外参进行标定,在此之前,需要先设定一个参数作为初始化参数,其中translation代表了以IMU坐标系为基坐标系,Lidar坐标系相对于IMU坐标系的一组平移变换,在默认的安装方式下,这一组默认参数可以被设定为
1
2
3
4
5
6
7
8
9rotation:
w: 0.7071
x: 0.0
y: 0.0
z: 0.7071
translation:
x: 0.0
y: 0.38
z: 1.33
Lidar2GNSS标定
标定数据采集
在进行Lidar-GNSS标定之前,需要先寻找一块平坦的地面,确保场地中心8米范围内有诸如电线杆、车辆、建筑等轮廓清晰的静态障碍物,避免有大量行人等动态障碍物出现。
进入Docker内环境,启动Dreamview,在
--setup mode--中选择模式Dev Kit Debug,并在--vehicle--中选择Dev Kit车型,在侧边栏中进入Module Controller页面,打开GPS、Localization和Lidar三个模块,在cyber_monitor中检查对应Channel下是否有数据,对应标准如前序环节所述。如各个Channel的输出没有问题,打开
Recorder模块开始记录数据,使用遥控器控制车辆缓慢绕“8”字至少5圈,这个过程中车辆的转弯半径应尽可能小,完成后,关闭Recorder模块,采集的驾驶数据将被保存在apollo/data/bag下,文件名是当前时间。
数据预处理
使用
cp -r docs/Apollo_Fuel/examples/sensor_calibration ./命令将数据抽取工作目录复制到工程根目录下,sensor_calibration目录中的每一个文件夹代表一个标定预处理任务,包括一个原始数据文件夹records、一个存放抽取后的数据的文件夹extracted_data以及一个配置文件XXX_to_XXXX.config,在本任务重,我们只需要其中的lidar_to_gnss文件夹。将
apollo/data/bag目录下采集到的数据拷贝到sensor_calibration/lidar_to_gnss/records,修改lidar_to_gnss.config文件,修改records字段下的record_path一项对应的路径为存储记录文件的路径,该路径下须有形如******.record.00001的记录文件,记录下io_config字段下的output_path一项对应的路径,这将是抽取后数据的保存路径,需注意,这里的路径需要时自/apollo/始的绝对路径。使用
cd /apollo/modules/tools/sensor_calibration切换工作目录,运行python extract_data.py --config /apollo/sensor_calibration/lidar_to_gnss/lidar_to_gnss.config命令,从记录数据中抽取出标定需要的数据,等待出现Data extraction is completed successfully!字样,抽取工作完成。运行过抽取命令后的目录结构如下所示1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16lidar_to_gnss/
├── extracted_data
│ ├── lidar_to_gnss-2020-10-27-20-26
│ │ ├── lidar16_to_gnss_calibration
│ │ │ ├── _apollo_localization_pose
│ │ │ ├── _apollo_sensor_lidar16_PointCloud2
│ │ │ └── sample_config.yaml
│ │ └── tmp
│ │ ├── _apollo_localization_pose
│ │ ├── _apollo_sensor_lidar16_PointCloud2
│ │ └── lidar16_sample_config.yaml
│ └── readme.txt
├── lidar_to_gnss.config
└── records
├── 20200723180717.record.00000
└── readme.txt编辑
extracted_data/lidar_to_gnss-XXXX-XX-XX-XX-XX/sample_config.yaml文件,修改transform字段下的translation的值,将其修改为前文所述的初始外参。
云标定
在BOS的Bucket中创建一个名为
sensor_calibration的文件夹存放原始数据,在建立一个名为out的文件夹存放输出的标定结果,将lidar16_to_gnss_calibration文件夹完整的上传至Bucket中sensor_calibration文件夹下,需要注意的是,目前BOS不支持文件夹上传,所以需要逐个文件夹的建立,再上传内部文件,同一次上传最多可以支持300个文件。上传完成之后,打开Apollo云服务,在Apollo Fuel中新建一个感知标定类型的任务,输入数据路径为
sensor_calibration,输出数据路径为out,然后将任务提交,标定过程大约需要持续1小时,完成后会收到邮件提醒。标定完成之后,标定结果会作为附件发送到邮箱里,附件名称为
velodyne16_novatel_extrinsics_example.yaml,同时在BOS的输出目录下会生成一个层次如下的目录:1
2
3
4
5
6
7
8
9
10
11
12
13
14out/
└── 20201104145626622504
└── lidar16_to_gnss_calibration
├── results
│ ├── tmp
│ │ └── lidar
│ │ ├── final_clouds
│ │ ├── init_clouds
│ │ ├── raw_clouds
│ │ ├── raw_pose
│ │ ├── lidar_result.pcd
│ │ └── lidar16_result_rgb.pcd
│ └── lidar16_novaltel_extrinsic.yaml
└── lidar_to_gnss_calibration_config.yaml对于标定结果的验证可以下载其中的
lidar16_result_rgb.pcd文件,使用点云查看工具打开,比较推荐的工具是开源软件CloudCompare,其官网为http://www.cloudcompare.org/,打开点云后,红色的线条代表驾驶的轨迹,如果周围的障碍物清晰锐利、边缘整齐,说明标定成功。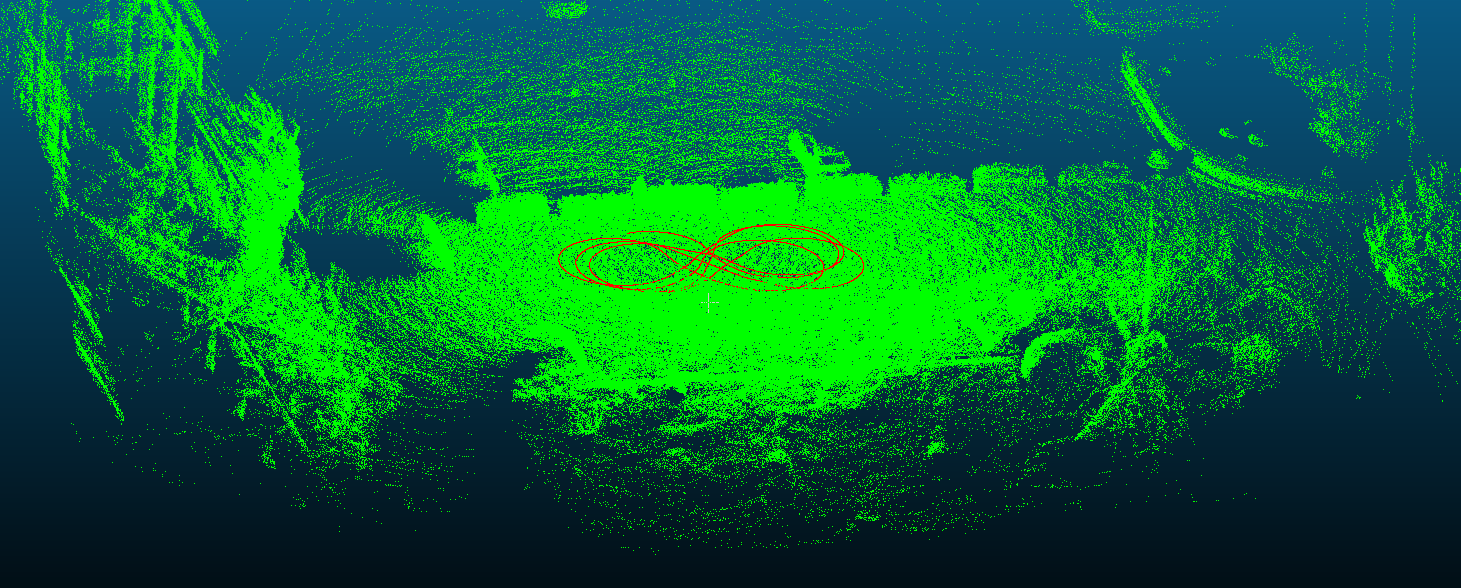
更新配置文件
- 如果标定成功,使用邮件附件
velodyne16_novatel_extrinsics_example.yaml中的rotation值和translation值替代工程目录中modules/calibration/data/dev_kit/lidar_params/velodyne16_novatel_extrinsics.yaml中对应的值以应用标定数据。
虚拟车道线生成
数据采集
将Apollo D-Kit驾驶至将进行自动驾驶的区域,进入Docker内环境,打开Dreamview,在
--setup mode--中选择模式Dev Kit Debug,并在--vehicle--中选择Dev Kit车型,在侧边栏中进入Module Controller页面,打开GPS、Localization和Lidar三个模块,另启动两个终端,分别进入Docker内环境并运行以下两条命令,启动相应Channel的Publisher。1
2python modules/tools/sensor_calibration/ins_stat_publisher.py
python modules/tools/sensor_calibration/odom_publisher.py检查
/apollo/localization/pose、/apollo/sensor/gnss/odometry、/apollo/sensor/gnss/ins_stat、/apollo/sensor/lidar16/compensator/PointCloud2四个Channel上的输出是否正常,如若正常输出,可以开始采集必要的数据。打开
Recorder模块,驾驶车辆沿计划实施自动驾驶的道路中央运行至路段终点,关闭Recorder模块,在apollo/data/bag中找到对应的记录以备后续使用,需要注意的是,虚拟车道线的生成环节中,提交的数据包不能超过5GB。
提交云服务
打开BOS中的Bucket,建立两个文件夹,用于存储原始数据的
virtual_lane和用于存储生成的虚拟车道线的lane_out,将上述文件夹下形如******.record.00001的记录文件上传至BOS上的virtual_lane目录下,再将上一个环节中邮箱里收到的外参文件重命名为velodyne16_novatel_extrinsics_example.yaml,也上传到这一目录下。打开Apollo云服务,在Apollo Fuel中提交虚拟车道线任务,输入数据路径为
virtual_lane,输出数据路径为lane_out,区域编号为51(此为大连地区的UTM投影编号),雷达类型为lidar16,车道宽度设置为理想的虚拟车道线宽度,譬如2.2,额外ROI扩展是虚拟车道线与实际车道线边缘的距离,为了安全,虚拟车道线可能设置的比实际宽度更窄,但是对于不在虚拟车道线范围内的环境也要建立感知,这就需要设定这一参数。设定完成后,提交任务。
应用虚拟车道线
在提交标定任务的约4-5小时后,预留的邮箱中会收到一条邮件提醒,代表标定工作已经完成,生成的地图将在BOS中的
lane_out目录下,将其下载下来,重命名为相应的名字并拷贝到/apollo/modules/map/data/下,路径即可生效。(Optional)由于BOS网页版不支持文件夹的下载,可以在https://cloud.baidu.com/doc/BOS/s/lk4tnbkrm中下载BOS桌面版,使用Access Key和Secret Access Key进行登录,在BOS桌面端里进行文件夹的下载。
自动驾驶实验
感知适配
在进行感知适配之前,需要先修改
modules/common/data/global_flagfile.txt,为其添加一行--half_vehicle_width=0.43,进入Docker内环境使用bash apollo.sh build_opt_gpu命令重新编译工程。启动Dreamview,在
--setup mode--中选择模式Dev Kit Debug,并在--vehicle--中选择Dev Kit车型,并选择生成的地图,在侧边栏中进入Module Controller页打开Canbus、GPS、Localization、Transform、Lidar以及Lidar Preception六个模块,检查tf、tf_static、/apollo/localization/pose、/apollo/sensor/lidar16/PointCloud2、/apollo/sensor/lidar16/Scan、/apollo/sensor/lidar16/compensator/PointCloud2、/apollo/perception/obstacles等Channel上是否有输出。在Dreamview的界面中观察,界面中是否有障碍物出现。在Dreamviewer中,绿色代表车辆、黄色代表行人、青色代表自行车,带有箭头的线代表对目标运动方向和归集的预测,目标的上方是它的ID、速度以及Apollo为他执行的策略,如IGNORE或CAUTION等。
规划适配
在感知适配的基础上再在
Module Controller页打开Planning、Prediction、Routing、Control模块。再在
Route Editing页中点击Add Point of Interest,然后在车道线上点击一个点作为终点,点击Send Routing Request发送路径规划请求。在这一页面中,按住鼠标右键可以拖动地图,使用鼠标滚轮可以对地图进行放缩,点击鼠标左键可以添加一个PoI点。此时,应看到一条红色的细线,标记着从当前位置到终点位置的路径,蓝色的粗线,代表着当前一个局部的具体规划,在终点处有一个红色的平面标志停止,当有行人出现在规划路径上时,同样会出现停止标志,并重新规划路径。
自动驾驶
将
--setup mode--切换为Dev Kit Closeloop,启动上述感知适配和规划适配中启动的各个模块,待模块完全启动后,发送路径规划请求,遥控器放权,在Tasks页面中点击Start Auto,此时,应看到车辆按照所规划的路径自动驾驶,此时可以观察界面中不断replan的轨迹和车辆的实时驾驶状态是否科学安全,如有异常,随时使用遥控器接管车辆。到达终点后,车辆会自动停止,此时先使用遥控器接管车辆,发送下一个目的地点,或结束实验。